| Дисклаймер: Все права на данный материал принадлежат Хабрахабр / Лучшие за сутки / Посты и могут быть найдены по ссылкам ниже. Много чего предстоит сделать, прежде чем мы дойдем до вот этой картинки: 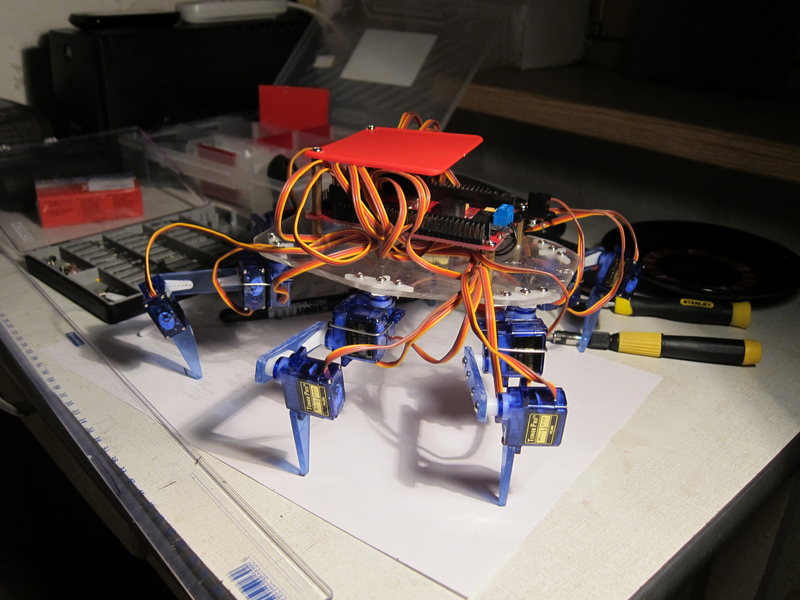 Опуская росказни о том, как именно я пришел к мысли построить гексапода (это были тонны видео на ютубе), перейду сразу к процессу выбора деталек. Это был январь 2012-го. Я сразу знал, чего я хочу от своего робота, а чего — нет. Я хотел: — каждая нога должна иметь 3 степени свободы — 3dof (3 dimensions of freedom). Потому что более простой вариант 2dof — не дает такого ощущения насекомого, а 4dof — излишне, 3dof и так позволяет свободно перемещать кончик ноги в 3д пространстве; — 6 ног; снова-таки, это уже не 4 (тогда робот неуклюже скачет), но и еще и не 8, как у пауков и уже чрезмерно; — небольшой; — дешевый; — минимум плат и соединений; Пост большой. Читать дальше → АВТОР: Хабрахабр / Лучшие за сутки / Посты http://habrahabr.ru/post/156579/ | |||
| | |||
| | |||
|
Monday, October 29, 2012
[Из песочницы] Собираем и заставляем бегать бюджетного гексапода
Subscribe to:
Post Comments (Atom)
No comments:
Post a Comment